

堀岡悠人さん(2024年度まで在籍)らによる研究論文が,ソフトロボティクス分野の国際専門誌 Soft Robotics(Mary Ann Liebert / SAGE)に採択・掲載されました(2026年2月).
本研究では,熱可塑性材料から作られた双安定ラティス上の変形波伝播速度を,材料や構造を交換せずに熱曲げ処理だけで動的に切り替える手法を提案しました.さらにこの機構を搭載した毛虫型ロボットが,単一モータのみで45°傾斜レールを 0.95 mm/s で登坂できることを実証しました.
Soft Robotics(SoRo)は,ロボティクス分野においてトップクラスの国際専門誌です.ロボティクス誌の中でも第1位にランクされており,インパクトファクター(IF)は 6.1,5年IFは 9.5 と,工学系ジャーナルとして高水準を維持しています.ソフトロボット・柔軟エレクトロニクス・生体力学・材料科学など幅広い領域をカバーし,生体との安全なインタラクションや複雑環境への適応を目指すロボット研究の中核的な発表の場となっています.このような影響力の高い雑誌に本研究室の成果が掲載されたことは,研究の国際的な認知と貢献を示すものと考えています.
研究の概要
ソフトロボットは多くの自由度を持つ一方,アクチュエータ数を少なく抑えることが求められます.本研究が着目したのは,複数の双安定構造を機械的に連結した「双安定格子」上を伝播するドミノ状の変形波です.従来,伝播速度は材料・形状によって固定されており,変更には分解・部品交換が必要でした.本研究では,熱可塑性素材(PET)で作製した折り紙型双安定構造に小型ニクロム線ヒーターを取り付け,異なる安定状態で加熱・冷却する「熱曲げ操作」を行うことで,2つの安定状態間のエネルギー差を可逆的に増減できることを示しました.エネルギー差が小さくなると変形波は遅くなり,大きくなると速くなります.
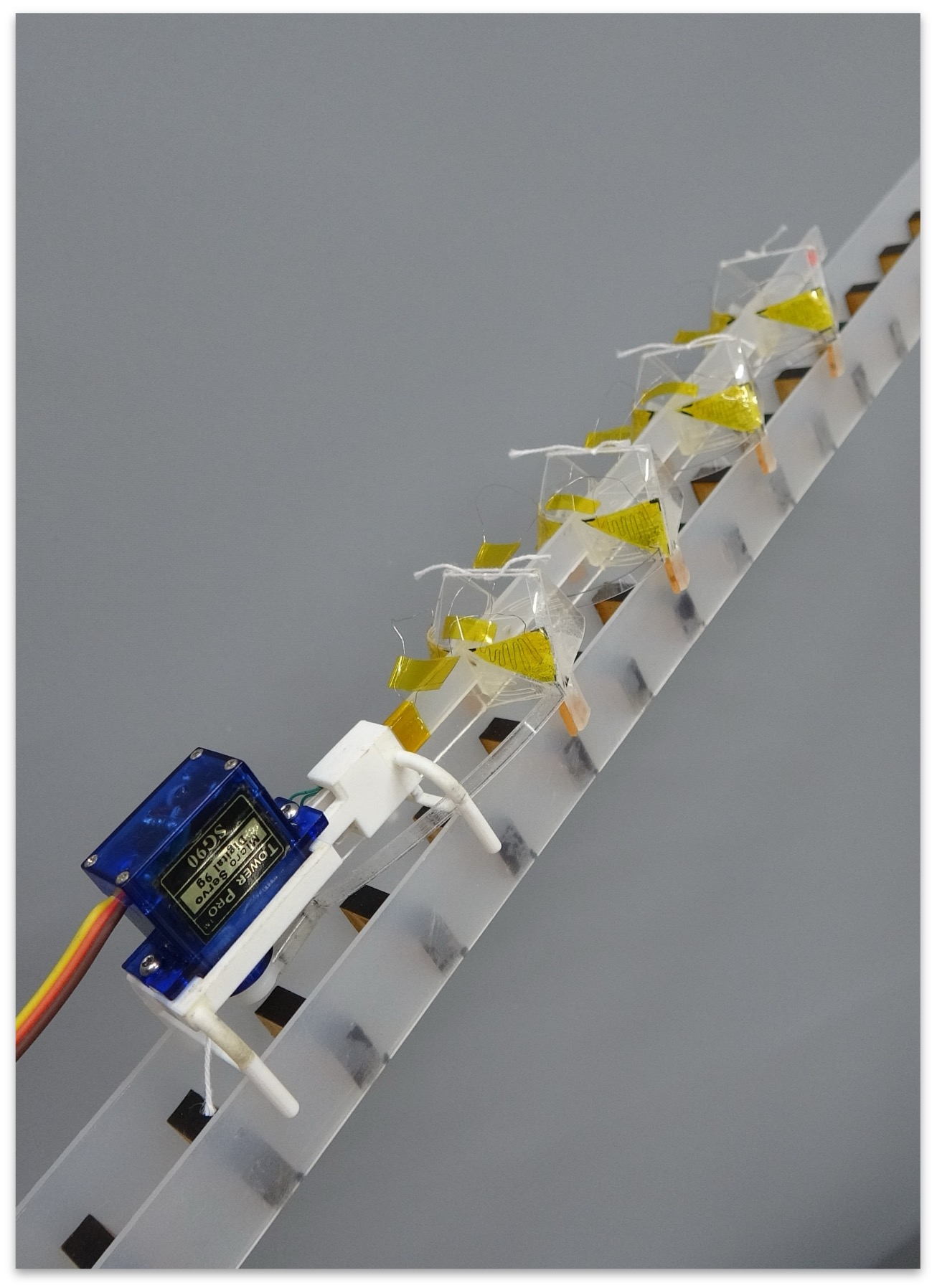
この原理を応用した4対の脚を持つ毛虫型ロボットは,単一サーボモータで全脚を順次動作させます.緩やかな波伝播(遅い波)では,同時に接地している脚の数が増えるため,傾斜面でのグリップ力が向上します.実験の結果,熱チューニングによって波を遅くした場合,45°傾斜レールでの登坂速度が速い波の場合と比較して5.5倍に向上しました.従来の磁場・空気圧制御と異なり,本手法は外部磁場・ポンプ・チューブが不要で,システムの軽量・コンパクトさを損なわないことが特徴です.パイプライン・導管内検査や内視鏡ナビゲーションなど,狭隘環境でのソフトロボット応用に向けた基盤技術として期待されます.
論文情報
Title: Thermally Tunable Deformation Wave on a Bistable Lattice to Enhance Soft-Bodied Climbing Robots
著者: Yuto Horioka, Takuya Umedachi
掲載誌: Soft Robotics(Mary Ann Liebert, A Part of Sage),
DOI: 10.1177/21695172261420668,
採択: 2026年2月.


コメント